













Comprendre les sources d’erreurs dans le positionnement de précision
Les erreurs des dispositifs de positionnement peuvent être réparties en deux types : l’inexactitude (erreurs prévisibles) et l’imprécision (erreurs aléatoires). La compréhension des sources et de l’ampleur de ces erreurs peut permettre d’élaborer des stratégies pour les empêcher et les corriger, et peut entraîner une confiance accrue dans la performance de votre système. Vous trouverez ci-après quelques-unes des caractéristiques les plus importantes qui sont utilisées pour décrire les erreurs de positionnement.

Figure 1: Illustration de la différence entre exactitude et précision
Résolution
La résolution est la mesure du plus petit changement de distance possible du système. Bien qu’il s’agisse d’une fonction importante dans les applications de positionnement, il ne s’agit pas d’une mesure d’exactitude ou de précision étant donné qu’il s’agit d’une valeur calculée. Elle se base sur les caractéristiques du contrôleur, du moteur et de la mécanique. Étant donné que les appareils Zaber™ utilisent des moteurs pas-à-pas avec des régulateurs micro-pas, on peut ainsi dire dans ce cas que la résolution correspond à la taille micro-pas. Même si ce n'est pas une mesure de l'erreur en elle-même, une résolution fine est nécessaire pour parvenir à un mouvement exact et précis.
Exactitude
Lors d’un déplacement entre deux points d’une course de déplacement, la caractéristique d’exactitude indique l'écart le plus grand qui puisse être envisagé entre la distance idéale et la distance véritablement parcourue. Il existe plusieurs sources d’erreurs qui expliquent cela et sur des distances courtes, on peut s’attendre à moins d’exactitude.
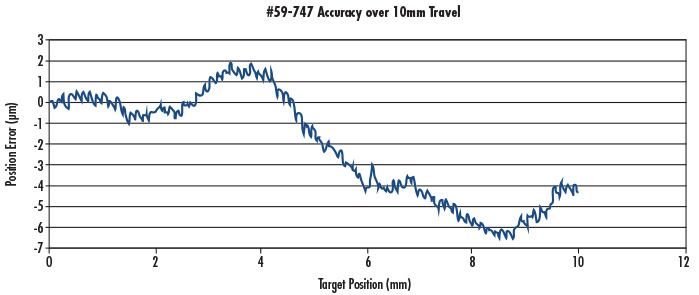
Figure 2: Exactitude d’une Platine Linéaire Zaber™ de 150 mm
Répétabilité
La répétabilité est la meilleure mesure de précision et de cohérence d’un dispositif de positionnement. Elle se définit par l’écart d’une position lorsqu'une position est approchée à de nombreuses reprises depuis une même direction. Pour les appareils Zaber™, il s’agit généralement d’un ordre de grandeur plus fin que la caractéristique d’exactitude.
Contre-coup
Le déplacement de systèmes mécaniques peut entraîner de petits écarts (ou espaces) dans le sens de déplacement pour éviter une sur-contrainte. En changeant de direction, ces écarts créent une petite quantité de mouvement perdu (ou jeu) qui doit être compensé. Ce mouvement est appelé un contre-coup dans le système.
Il est facile de tenir compte de cette source d’inexactitude dans de nombreux systèmes. Une des méthodes consiste à être constant dans la direction approchant des positions cruciales. Une autre consiste à appliquer une légère force axiale pour pousser la platine vers l’un des côtés de l’écart. Dans les applications verticales, la gravité appliquera la force et compensera le contre-coup.













ou consulter les numéros d’autres pays
facile à utiliser
entrer les numéros de stock pour commencer
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
L'entreprise Edmund Optics GmbH en Allemagne agit comme un mandataire d'Edmund Optics Ltd au Royaume-Uni. Le titulaire du contrat est Edmund Optics Ltd au Royaume-Uni.